
Konspekt
Основные законы для роботов:
- Робот не может причинить вред человеку или своим бездействием допустить, чтобы человеку был причинён вред.
- Робот должен повиноваться всем приказам, которые даёт человек, кроме тех случаев, когда эти приказы противоречат Первому Закону.
- Робот должен заботиться о своей безопасности в той мере, в которой это не противоречит Первому или Второму Законам.
Они были сформулированы в рассказе «Хоровод», вышедшем в 1942 году
Позднее, в 1986 году, Азимов сформулировал так называемый нулевой закон:
0. Робот не может причинить вред человечеству или своим бездействием допустить, чтобы человечеству был причинён вред.
1. Mis on robot? Maailma esimene robot.
Робот – это механическое интеллектуальное устройство, способное решать задачи автономно или с внешней (человеческой) помощью. На практике робот обычно представляет собой электромеханическую машину, управляемую компьютером. С другой точки зрения, роботы делятся на две группы:
- Гуманоиды и другие роботы, вдохновленные биологическими существами. К ним относятся
человекоподобные устройства (например, ASIMO, робот-гуманоид, выпускаемый компанией Honda в
Японии с 2000 года), а также другие роботы, похожие на биологические системы, например,
насекомоподобные роботы (см. рис. 1), роботы-фермы и т.д. - вспомогательные роботы, используемые для выполнения слишком монотонной или опасной и сложной
для человека работы. Это промышленные, военные и сервисные роботы, мобильные роботы и т. д.
Считается, что самым первым роботом был робот автомобильного завода General Motors под названием Unimate, который приступил к работе весной 1961 года. В задачу робота входило охлаждение отформованных дверных ручек автомобиля в бассейне, чтобы их можно было передавать на линию для дальнейшей обработки.
2. Robotite arendamis põlvkonnad. Nimeta ja seleta.
Роботов можно разделить на три поколения:
- Первое поколение. Первое поколение роботов было простым по конструкции и не имело датчиков и сенсоров окружающей среды. Они могли выполнять свою работу только в неизменных условиях. Например, роботизированная рука, поднимающая бутылки в ящики на пивоваренном заводе. Робот выполняет одинаковые движения, но поскольку у него нет сигнала от окружающей среды, то есть он не получает обратной связи о своих действиях, он перестает правильно работать при изменении условий. Такие роботы больше не считаются правильными роботами.
- Второе поколение. Роботы второго поколения – это роботы, которые могут реагировать на изменения в окружающей среде с помощью датчиков. Поскольку робот может чувствовать окружающую среду, его эффективность во многом зависит от программного обеспечения, которое им управляет. Роботы, используемые в этом курсе, также относятся к роботам второго поколения, если они используют датчики для восприятия окружающей среды и запрограммированы на автономные действия.
- Третье поколение. Третье поколение находится в стадии разработки. Роботы третьего поколения могут анализировать ситуации и учиться на них. Например, робот из фильма “Я, робот”, который может делать выводы и учиться на них, относится к третьему поколению.
Liigita järgnevad robotid põlvkondade kaupa:
- nõudepesumasin – II поколение
- fikseeritud liikumisega robotkäsi – I поколение
- automaatselt süttiv lamp – II поколение
- ise keeli õppiv robot – III поколение
3. Miks manipulaatorid ei ole robotid?
Манипуляторы – это не роботы, поскольку они управляются непосредственно человеком. Манипуляторы не способны работать автономно. Информация, необходимая для работы манипуляторов, поступает через органы чувств человека и обрабатывается в его мозге. Таким образом, манипуляторы – это всего лишь исполнители.
Известные манипуляторы – это автомобили с дистанционным управлением и лампочки с выключателями.
4. Mis on masinate eelised võrreldes inimtööjõuga?
Поскольку роботы – это механические устройства, они не устают и не скучают, что делает их идеальными для рутинной работы. Именно поэтому роботы используются во многих промышленных компаниях, чтобы выполнять монотонную работу быстрее и качественнее. Кроме того, роботы не так чувствительны к условиям труда, как люди, и могут использоваться на шумных, плохо освещенных рабочих местах и даже там, где работа человека опасна для жизни из-за радиации или других факторов риска. Роботы также используются в местах, куда нельзя послать человека для выполнения работы, например, для исследования дна океана или Марса. Роботы также могут использоваться в развлекательных целях. Например, умные игрушки и танцующие роботы.
5. Millised kolm tingimust peavad olema täidetud, et teatud masinat või seadet saaks robotiks nimetada?
Роботом может быть любая система, имеющая датчик, контроллер и исполнительный механизм. Датчик предоставляет контроллеру информацию о внешнем мире, контроллер обрабатывает эту информацию и управляет действиями устройства, а исполнительный механизм – это устройство для перемещения или переключения самого робота или одной из связанных с ним структур.
6. Millistes Eesti tööstusettevõtetes võiksid mehhatroonikud töötada?
Машиностроение и металлообработка
- ABB (Юри, Лагеди) — автоматизация и робототехника
- Estanc — производство промышленных резервуаров под давлением
- Favor AS — обработка листового металла и промышленные решения
Электроника и автопром
- Enics Eesti (Элва) — производство электронных устройств
- Scanfil (Пярну) — сборка электроники
- Skeleton Technologies — суперконденсаторы и системы накопления энергии
Пищевая промышленность
- A. Le Coq (Тарту) — автоматизированные линии по производству напитков
- Valio Eesti — механизированное производство молочной продукции
- HKScan (Раквере) — автоматизация и роботы в мясопереработке
Упаковка и логистика
- Smurfit Kappa (Пярну) — упаковка и автоматические производственные линии
- Логистические компании вроде Itella и Omniva, где используются сортировочные роботы
Автоматизация и промышленная робототехника
- Proekspert — разработка программного и аппаратного обеспечения для промышленности
- Clevon (бывший Cleveron) — автономные роботы-доставщики
- Eli — робототехника и разработка дронов
Kirjuta definitsioonid:
- Robot – Робот – это механическое интеллектуальное устройство, способное решать задачи автономно или с внешней (человеческой) помощью. На практике робот обычно представляет собой электромеханическую машину, управляемую компьютером
- Robootika – Робототехника – это область техники и технологии, которая занимается развитием прикладных наук и технологий, необходимых для создания роботов: проектирование, конструирование, разработка алгоритмов, производство роботов и их применение. Робототехника тесно связана с такими областями, как электроника, машиностроение, механика, мехатроника и разработка программного обеспечения.
- Manipulaator – Манипулятор – это устройство или машина, которой управляет человек. Вопреки ошибочному мнению, манипуляторы – это не роботы, поскольку они управляются непосредственно человеком. Манипуляторы не способны работать автономно. Информация, необходимая для работы манипуляторов, поступает через органы чувств человека и обрабатывается в его мозге. Таким образом, манипуляторы – это всего лишь исполнители. Известные манипуляторы – это автомобили с дистанционным управлением и лампочки с выключателями.
- Mehhatroonika – Мехатроника – это разнообразная отрасль инженерного дела, объединяющая механику, электронику, компьютерную инженерию, разработку программного обеспечения, теорию управления и проектирование систем с целью создания более совершенного продукта. Отсюда и название м е х а т р о н и к и : механика + электроника. Механика нужна для того, чтобы уметь создавать машины, а электроника – для управления механическими системами. Слово “мехатроника” пришло из французского языка и культуры.
- Andur – Датчик – это устройство, которое измеряет величину и преобразует ее в электрический сигнал. Проще говоря, датчик – это орган чувств для робота, так же как у человека есть глаза, уши, нос и т. д. Подобно тому, как электрические импульсы движутся в нервных клетках, компоненты робота общаются друг с другом с помощью электрических сигналов. От датчика в мозг робота поступает электрический сигнал, который сообщает роботу, следует ли ему действовать. Чем больше датчиков использует робот, тем точнее его можно запрограммировать на поведение и тем больше различных функций ему можно доверить.
- Täitur – Исполнителем может быть любое устройство, на которое можно воздействовать. Примерами исполнительных устройств для роботов могут быть двигатели, нагреватели и т. д. Цель исполнительного устройства – воздействовать на окружающую среду. Например, робот, контролирующий температуру в помещении, будет включать отопление, когда температура упадет ниже заданного предела, и выключать его, когда будет достигнута необходимая температура.
- Kontroller – Контроллер – это мозг робота. Сигнал от датчиков поступает на вход микроконтроллера, где он анализируется и используется роботом для выполнения дальнейших действий. Контроллер содержит алгоритм, по которому робот принимает решения.
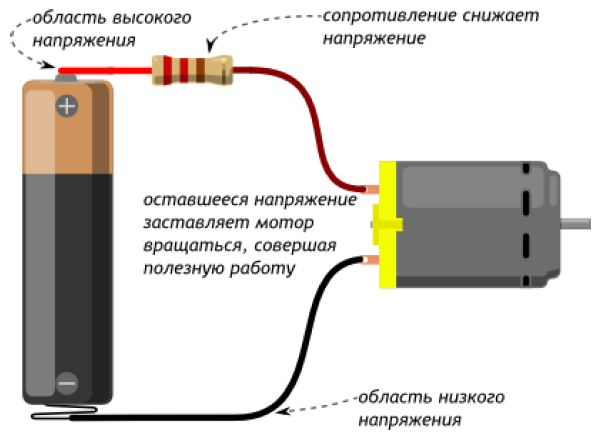
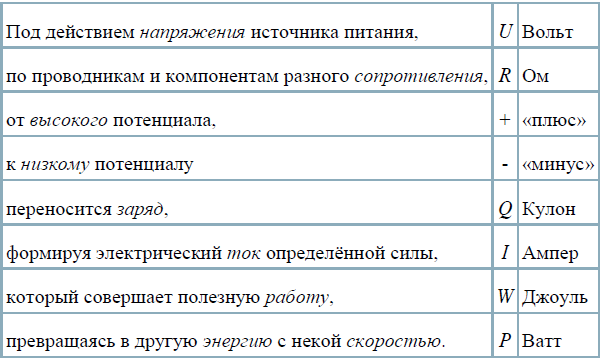
7. Elekter/Электричество
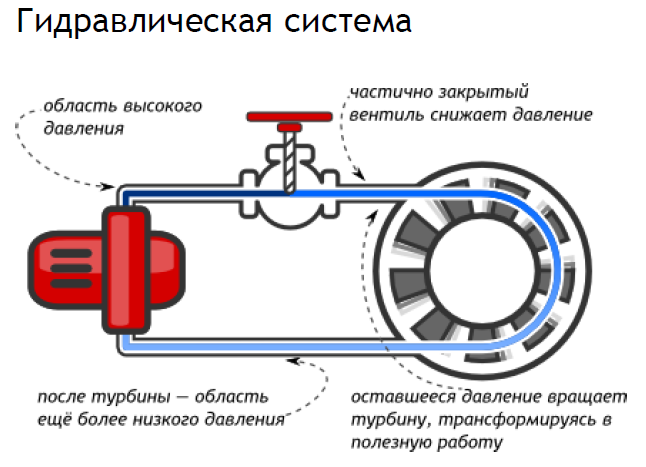
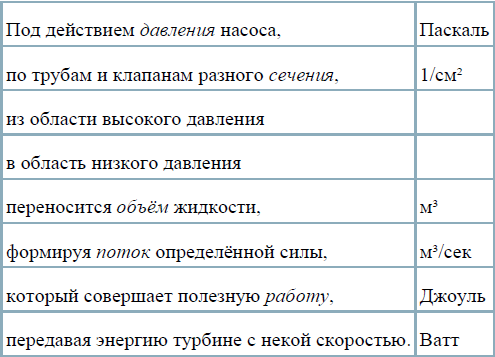
8. Elektriahi/Электрическая цепь
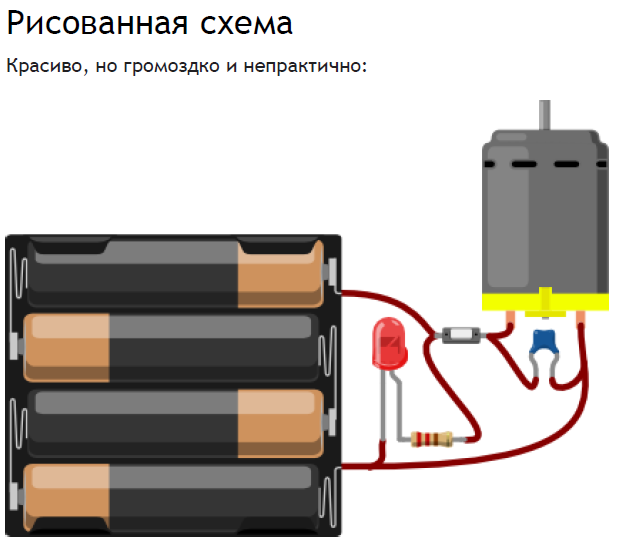
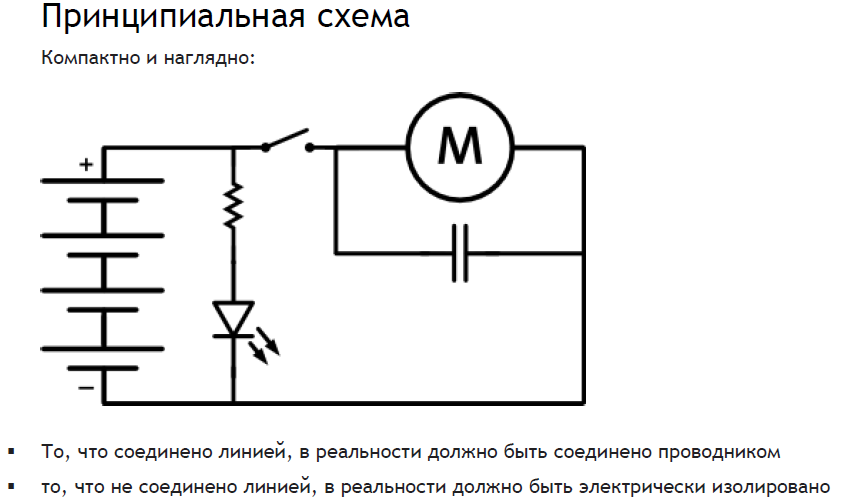
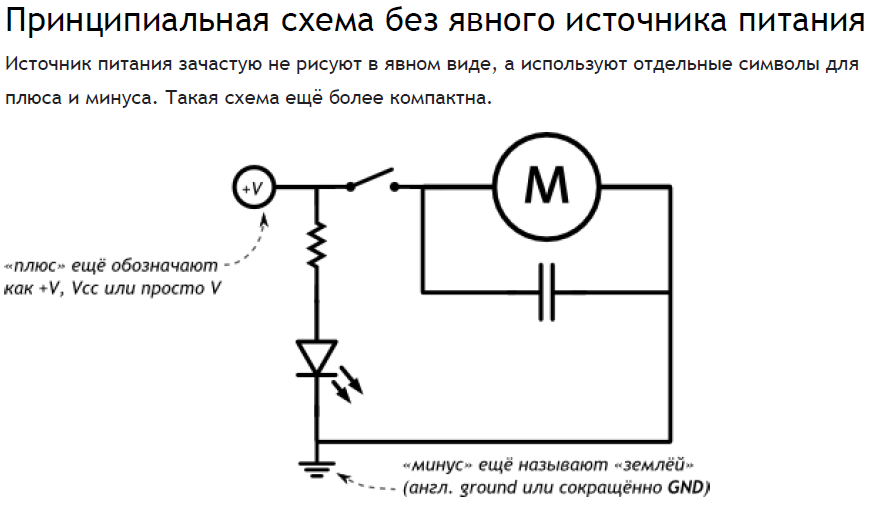
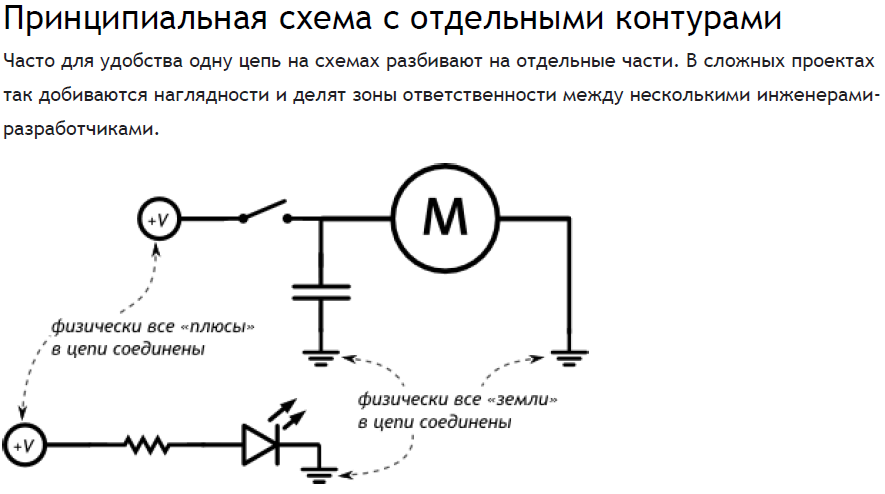
9. Рисованная и принципиальная схема(примеры)
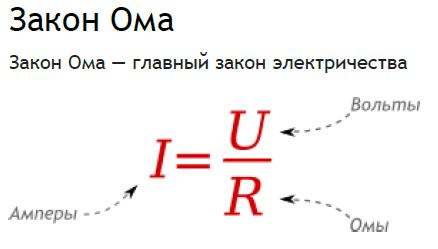
10. Закон Ома
11. Параллельное и последовательное соединение(опиши основные принципы)
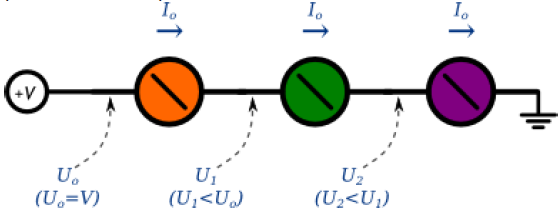
Последовательное подключение
При последовательном подключении сила тока в каждом потребителе — одна и та же,
различается напряжение: в каждом компоненте падает его часть.
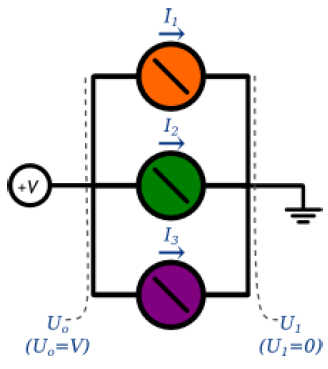
Параллельное подключение
При параллельном подключении напряжение вокруг каждого потребителя — одно и то же,
различается сила тока: каждый потребляет ток в соответствии с собственным
сопротивлением.
12. Микроконтроллер
Одним из важнейших компонентов мехатронной системы является микроконтроллер, или сокращенно контроллер, в котором обрабатывается информация и подаются команды на исполнительные механизмы. Контроллер также можно сравнить с небольшим компьютером, в котором все функции (процессор, память, преобразователи ввода-вывода и т. д.) сосредоточены на одном чипе, поэтому его часто называют микроконтроллером.
Микроконтроллер можно сравнить с крошечным компьютером, который, помимо своей основной функции – выполнения инструкций, имеет еще и достаточно широкий чип с рядом встроенных периферийных устройств и интерфейсов. Интерфейсы позволяют обмениваться данными в соответствии с согласованным стандартом. Основной частью микроконтроллера является центральный процессор, который, как и процессор обычного персонального компьютера, отвечает за выполнение программных инструкций. В отличие от обычного компьютера, также включает в себя оперативную память, EEPROM и Flash, контроллер прерываний и ряд интерфейсов на одном кристалле
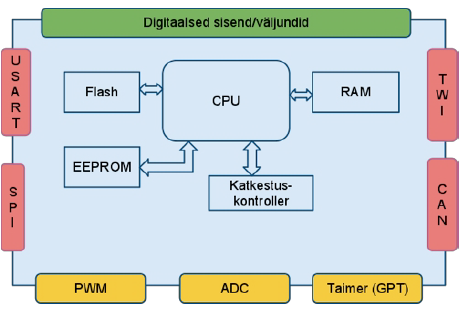
Память
С точки зрения пользователя, важно различать два типа памяти микроконтроллера. Первый тип памяти – это память программ (Flash), которая используется для хранения скомпилированной операционной программы микроконтроллера, содержащей пользовательские инструкции по управлению контроллером. Объем этой памяти определяет размер и сложность программы, которая может быть загружена в конкретный микроконтроллер. Для небольших 8-битных микроконтроллеров, таких как ATtiny, размер этой памяти составляет от 0,5 до 8 кБ, для
более крупных представителей того же семейства, ATmega, – от 4 до 256 кБ, а для 32-битных контроллеров – до 512 кБ. Второй тип памяти – память данных, или EEPROM, которая может использоваться для хранения данных подобно жесткому диску компьютера даже при отключенном питании контроллера. Объем памяти очень мал по сравнению с обычным жестким диском, например, 1024 байта для ATmega32. Однако для большего объема данных можно легко подключить к контроллеру стандартную карту флэш-памяти (SD-карту) и хранить данные на
ней.
Реестры
Регистры – это ячейки памяти микроконтроллера, которые имеют определенный адрес и название. Они похожи на переключатели, которые можно включать и выключать программно, причем каждый так называемый переключатель имеет свою цель и значение, например, меняет направление вывода, включает функцию или выражает входные данные. В случае 8-разрядного микроконтроллера большинство регистров также являются 8-разрядными. Образно это можно представить как панель из восьми переключателей.
Цифровые входы-выходы
Часто используемые контакты ввода/вывода обычно служат для обмена цифровыми сигналами между контроллером и периферийным устройством. Контакт может быть запрограммирован на работу в любом направлении путем установки соответствующего значения регистра. Например, 0 (переключатель вверх) означает, что пин работает как вход, а 1 (переключатель вниз) – как выход. Второй регистр можно использовать для установки данных на бит для того же вывода или, если вывод установлен как вход, для считывания данных. Данные равны 0 или 1, т.е. подается ли на вывод питание (логическая 1) или заземление (логический 0).
Аналого-цифровой преобразователь
Микроконтроллер – это цифровое устройство, и все операции и обмен данными между ним и периферийными устройствами осуществляются с помощью цифровых сигналов. К сожалению, реальный мир вокруг нас аналоговый, а это значит, что большинство физических явлений имеют постоянные величины, которые мы хотели бы измерять с помощью микроконтроллера. Например, температура – это не просто 0 или 1, а бесконечное число промежуточных значений. Для преобразования аналоговых величин большинство микроконтроллеров имеют встроенный аналого-цифровой преобразователь (АЦП), который позволяет подключать аналоговые датчики
непосредственно к контроллеру. Преобразователь преобразует аналоговый сигнал в цифровой, понятный контроллеру. Точность процесса преобразования зависит от разрешения преобразователя. Например, обычное 10-битное разрешение позволяет разделить диапазон входного напряжения на 1024 части. Как правило, к контроллеру требуется подключить несколько аналоговых преобразователей, поэтому при выборе контроллера важно учитывать, сколько аналоговых входных каналов имеет тот или иной контроллер.
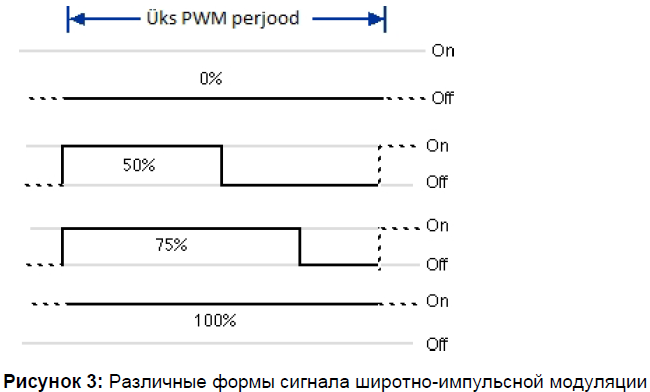
Широтно-импульсная модуляция
Широтно-импульсная модуляция (ШИМ) – это тип цифрового сигнала, который, помимо простого
включения/выключения, позволяет устройствам эмулировать аналоговый сигнал. Обычная широтно-импульсная модуляция – это переключение сигнала на высокий и низкий уровни с заданной частотой, где длительность высокого и низкого состояний определяет поведение устройства, подключенного к контроллеру. Если высокий и низкий уровни имеют одинаковую длительность, то можно сказать, что сигнал усредняется по половине напряжения питания, и если частота достаточно высока, то устройство, подключенное к контроллеру, будет вести себя так же, как если бы к нему была приложена половина напряжения питания.
13. Põhikomponeendid Arduino:
- Разъем USB (USB Порт) – Может использоваться для питания схем, а также для связи с компьютером.
- Разъем Питания (от батареи) – Может использоваться с блоками питания 9 – 12 Вольт.
- GND (GND – ground, заземление) гнезда. Эти гнезда используются для заземления схемы.
- 5V (V – volt) гнездо. Гнездо 5 В можно использовать для подачи питания 5 В на дополнительные компоненты, подключенные к плате разработки.
- Гнездо 3,3 В. Гнездо 3,3 В можно использовать для подачи напряжения 3,3 вольта на дополнительные компоненты, подключенные к плате разработки.
- Аналоговые разъемы (A0-A5) считывают сигнал с аналоговых датчиков и преобразуют его в цифровую форму, которая может быть прочитана программой и после обработки выведена через цифровой разъем. Аналоговое гнездо также можно использовать для вывода сигнала, если это необходимо./Порты (Analog In, Power In, Ground, Power Out, Reset) – аналоговые, входящие, исходящие, питание и земля.
- Цифровые гнезда (D0-D13). Их можно использовать для считывания и вывода цифрового сигнала. 15
- Гнезда широтно-импульсной модуляции (ШИМ) можно использовать для имитации аналогового выхода. Порты (ARef, Ground, Digital, Rx, Tx) – опорное напряжение, земля, цифровые порты, порты приема и передачи данных.
- Гнездо AREF можно использовать для считывания данных с дополнительного аналогового входа с фиксированной силой, если это необходимо.
- Кнопка Reset – Нажатие кнопки Reset перезапускает исходный код, загруженный на плату разработки Arduino. Если выполнение программы было прервано, кнопка может быть использована для перезапуска программы. Это также удобный способ тестирования кода, если вам нужно запустить код несколько раз, вы можете сделать это, нажав кнопку. /(сброс) – ручной перезапуск платы Arduino, приводит к перезапуску вашей программы.
- Загорелся светодиод питания (LED – Light-emitting Diode). Светодиод питания загорается, когда плата Arduino подключена к сети. Если светодиод не загорается после подачи питания, есть риск, что с платой что-то не так. /Индикатор (Индикатор питания) – сигнализирует о подаче питания на плату Arduino.
- Светодиодные индикаторы TX (TX – передача) RX (RX – прием) – Эти светодиодные индикаторы используются для указания того, когда плата разработчика принимает или отправляет данные. При отправке данных горит светодиод TX, при приеме данных горит светодиод RX. /Индикатор (RX: Прием) – Используется для индикации приема данных, если конечно это прописано в программе.Индикатор (TX: Передача) – Используется для индикации передачи данных, если конечно это прописано в программе.
- Микроконтроллер ATmega328P, управляет платой разработки Arduino Uno.
- Регулятор напряжения. Стабилизатор напряжения регулирует напряжение, подаваемое на схему платы разработки. Если напряжение слишком высокое, регулятор напряжения изменяет напряжение, чтобы оно соответствовало плате.
- Valgusdiood (LED)/светодиод – энергоэффективная, надёжная, долговечная «лампочка». Вид диода, который светится, когда через него проходит ток от анода (+) ккатоду (−).
- Nupp/кнопка – простой, всем известный механизм, замыкающий цепь пока есть давление на толкатель.
- Fototakisti/фоторезистор – это электронный компонент сопротивление которого зависит от количества падающего света.
- Takisti/резистор – искусственное «препятствие» для тока. Сопротивление в чистом виде. Резистор ограничивает силу тока, переводя часть электроэнергии в тепло.
- Potentsiomeeter/потенциометр – это резистор, сопротивление которого можно изменять, поворачивая ручку или винт. При изменении сопротивления напряжение на клеммах потенциометра изменяется в соответствии с законом Ома (ток I постоянен). Если потенциометр подключен к вращающемуся валу, то с помощью потенциометра можно измерить угол поворота этого вала.
- Temperatuuriandur/термодатчик – это электронный компонент, сопротивление которого зависит от температуры.
- Servomootor/серводвигатель – это двигатель постоянного тока с подключенным редуктором, возможностью обратной связи и управляющей электроникой. Обратная связь означает, что пользователь точно знает, насколько сильно повернулся серводвигатель. Поэтому, в отличие от обычного двигателя постоянного тока, серводвигателем можно управлять с высокой точностью.
- Mootor/моторчик – Мотор переводит электрическую энергию в механическую энергию вращения.
- Vedelkristallekraan/LCD экран – это жидкокристаллический дисплей, который может отображать как фигуры, так и текст. В графическом дисплее все пиксели распределены по экрану в виде одной большой матрицы.